 PSRCHIVE
PSRCHIVE
| Ask a Question | Search PSRCHIVE: |
PSRCHIVE
| Ask a Question | Search PSRCHIVE: |
 Home Home
|
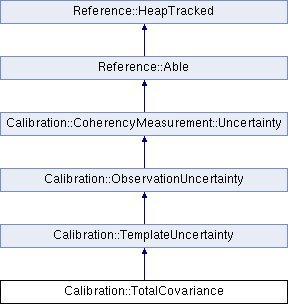
Calibration::TotalCovariance Class Reference Combines the uncertainty of the template and the observation. More...
Inheritance diagram for Calibration::TotalCovariance:
Detailed DescriptionCombines the uncertainty of the template and the observation. Member Function Documentation◆ add()
Add the uncertainty of another instance. Reimplemented from Calibration::TemplateUncertainty. ◆ build()
Compute inv_covar attribute. Reimplemented from Calibration::TemplateUncertainty. References Calibration::TemplateUncertainty::built, MEAL::StokesCovariance::get_covariance(), inv_covar, observation_covariance, Calibration::TemplateUncertainty::observation_variance, optimizer, MEAL::StokesCovariance::set_transformation(), MEAL::StokesCovariance::set_variance(), Calibration::TemplateUncertainty::template_variance, and Calibration::TemplateUncertainty::transformation. Referenced by get_weighted_conjugate(), and get_weighted_norm(). ◆ clone()
◆ get_weighted_conjugate()
Given a coherency matrix, return the weighted conjugate matrix. Reimplemented from Calibration::TemplateUncertainty. References build(), Calibration::TemplateUncertainty::built, inv_covar, and TotalCovariance(). ◆ get_weighted_norm()
Given a coherency matrix, return the weighted norm. Given a coherency matrix, return the difference. Reimplemented from Calibration::TemplateUncertainty. References build(), Calibration::TemplateUncertainty::built, inv_covar, and TotalCovariance(). ◆ set_covariance()
Set the covariances of the observed Stokes parameters. Set the uncertainty of the observation. References Calibration::TemplateUncertainty::built, and observation_covariance. ◆ set_optimizing_transformation()
Set the optimizing transformation applied to the template. Set the optimizing transformation. References Calibration::TemplateUncertainty::built, and optimizer. The documentation for this class was generated from the following files:
Generated using doxygen 1.14.0
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 Install
Install Use
Use Develop
Develop Support
Support News
News